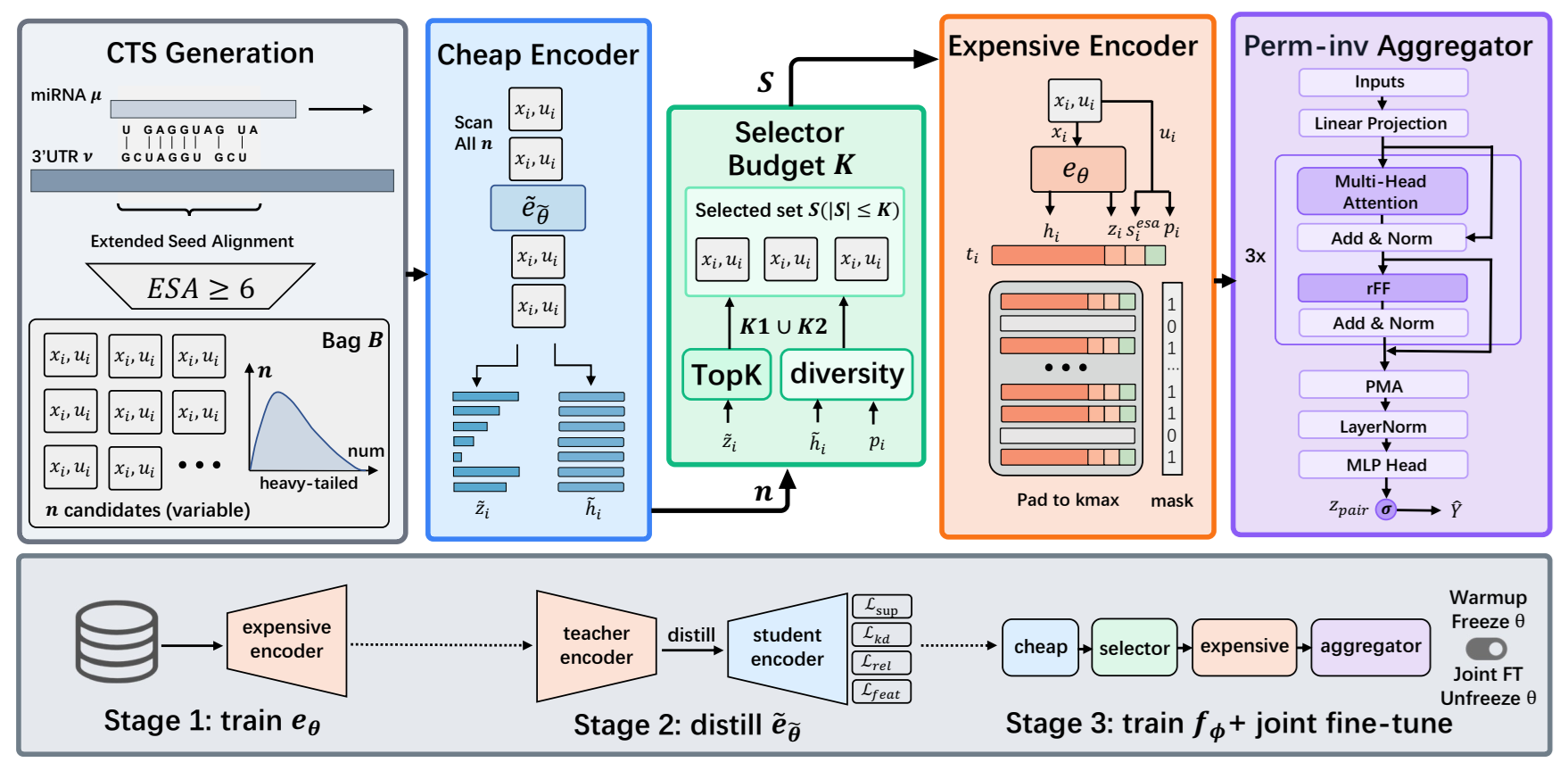
PAIR-Former: Budgeted Relational MIL for miRNA Target Prediction
Jiaqi Yin, Baiming Chen, Jia Fei, Mingjun Yang

Undergraduate Researcher · Harbin Institute of Technology
I am an undergraduate student majoring in Artificial Intelligence at Harbin Institute of Technology. My research interests include embodied intelligence and robotics.
I am currently a visiting research student at Zhongguancun Academy, supervised by Prof. Ce Hao. During my gap year, I was a visiting student at SSR Group, Tsinghua SIGS (supervised by Prof. Wenbo Ding) and X-Institute (supervised by Prof. Wenzeng Zhang) in Shenzhen.
I am actively seeking PhD opportunities starting Fall 2027. If you think I could be a good fit for your group, please feel free to reach out! (Update: PhD advisor confirmed on 2026-05-14.)



Email: yjqhit@gmail.com | 2078004110@qq.com
* Equally contributed, † corresponding author.
Jiaqi Yin, Baiming Chen, Jia Fei, Mingjun Yang
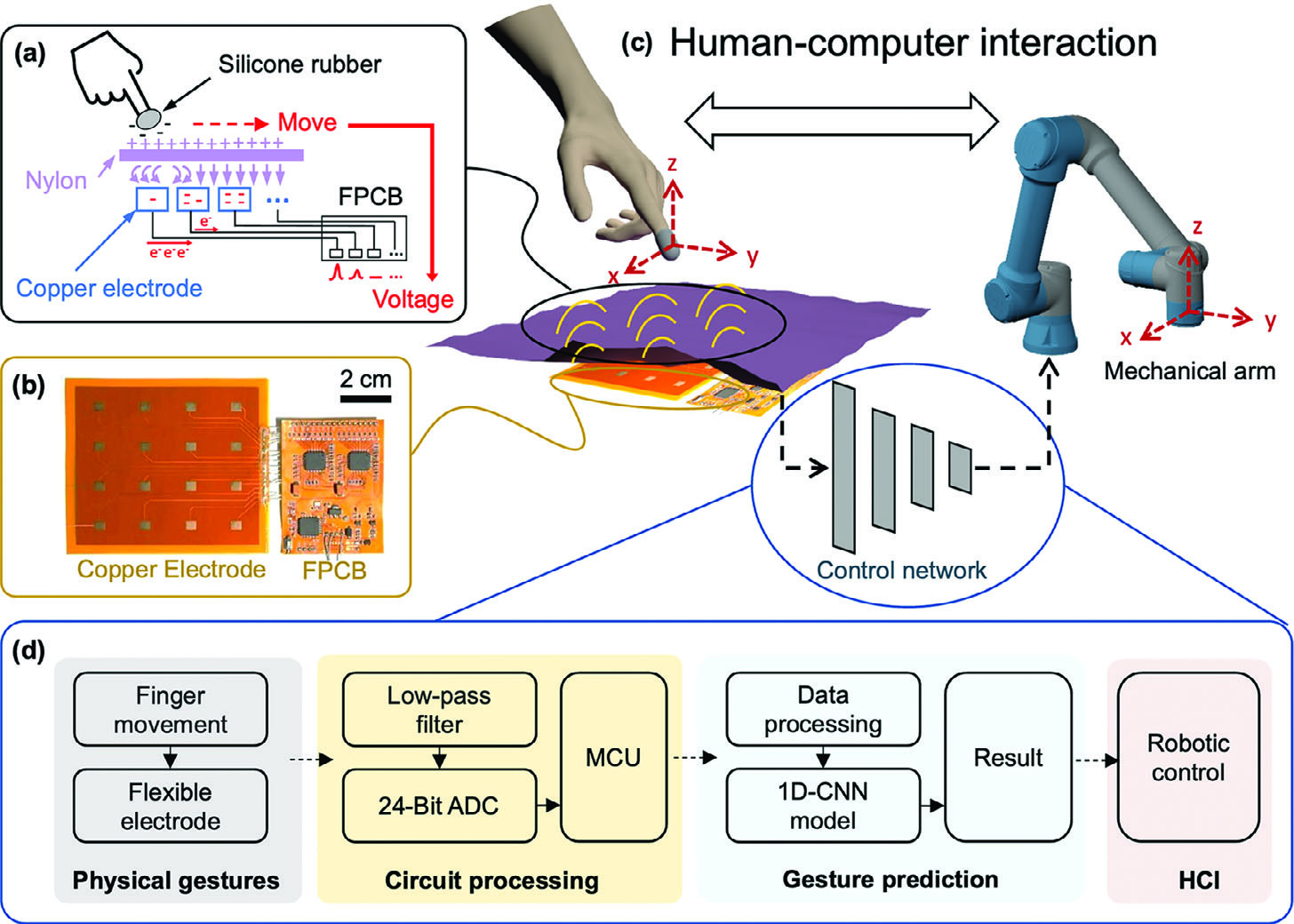
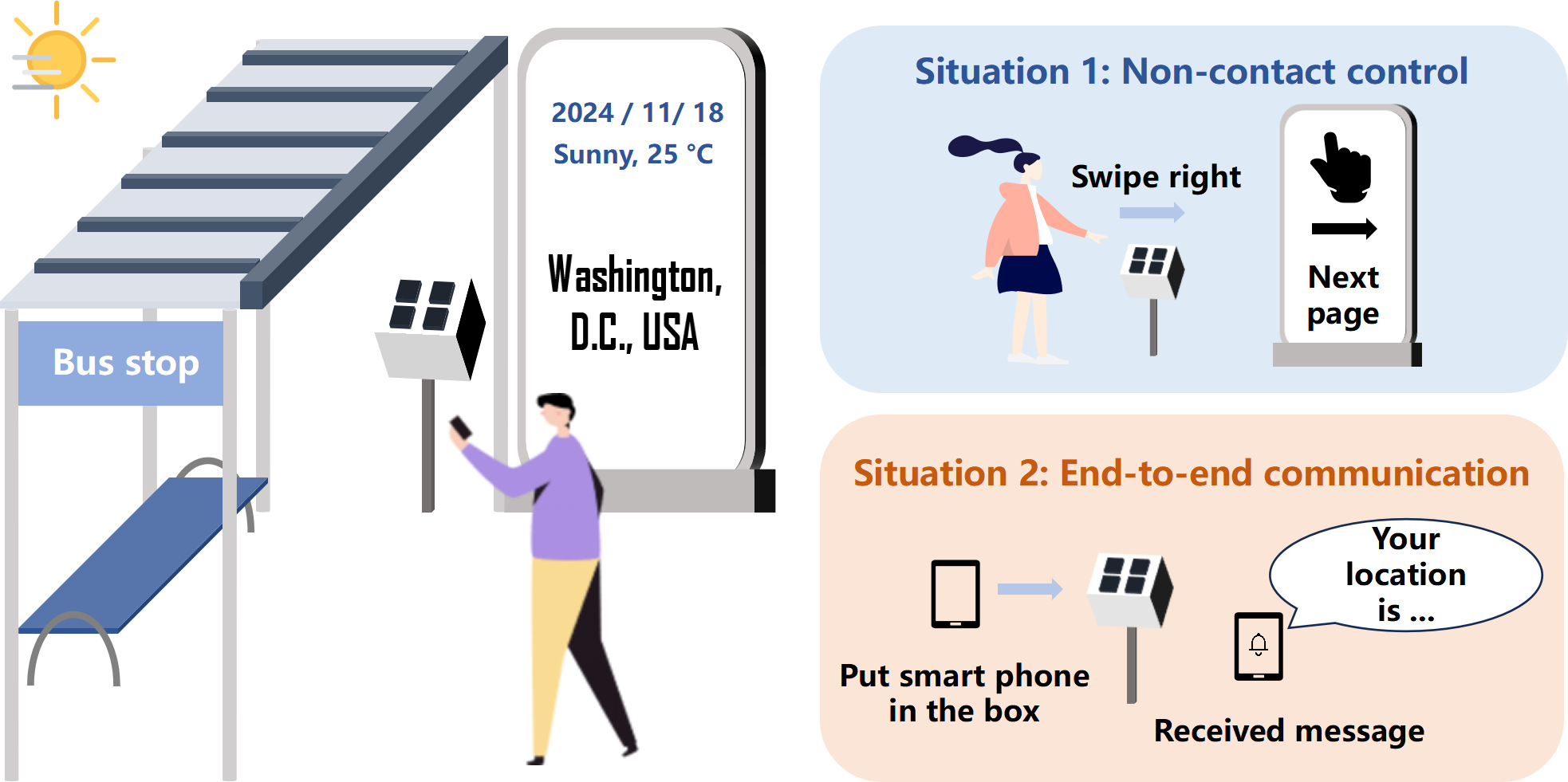
Qinghao Xu, Junhao Gong, Jiayi Chen, Yimeng Zhang, Hongfa Zhao, Jiaqi Yin, Runze Zhao, Chuqiao Lyu, Wenbo Ding, Changsheng Wu
Liguang Ruan, Chenxin Liang, Jiaqi Yin, Jiarong Li, Xiaojun Liang, Wenbo Ding
A lightweight control library that decouples high-level policy (RL/IL/VLA) from 1 kHz FCI real-time control. Supports single-machine and dual-machine (GPU cluster + control PC) deployment via ZeroMQ. Provides a Gymnasium-style reset()/step()/close() interface, multiple interpolators (Ruckig, PT1, CubicSpline), joystick teleoperation, and independent gripper service.